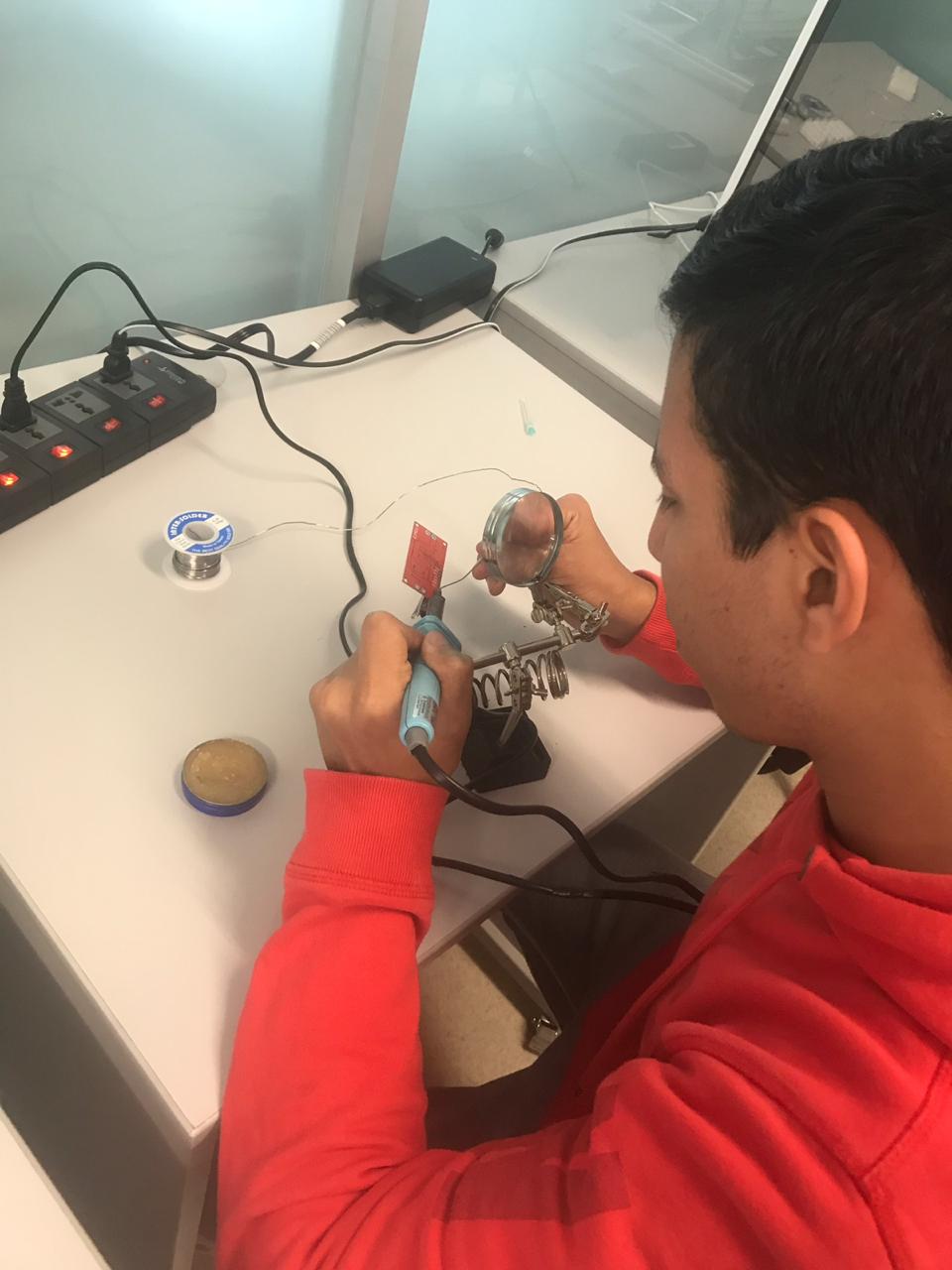
Driver
Para poder controlar el motor con el arduino será necesario utilizar un componente electrónico llamado driver. Este nos permite darle al motor el voltaje necesario (24 voltios) mediante una fuente externa, ya que el arduino tiene un máximo de 5 voltios.
Cabezal
Estamos rediseñando el modelado 3d del cabezal para que pueda ser más fácil de usar y pueda ser adaptable a cualquier silla de ruedas.
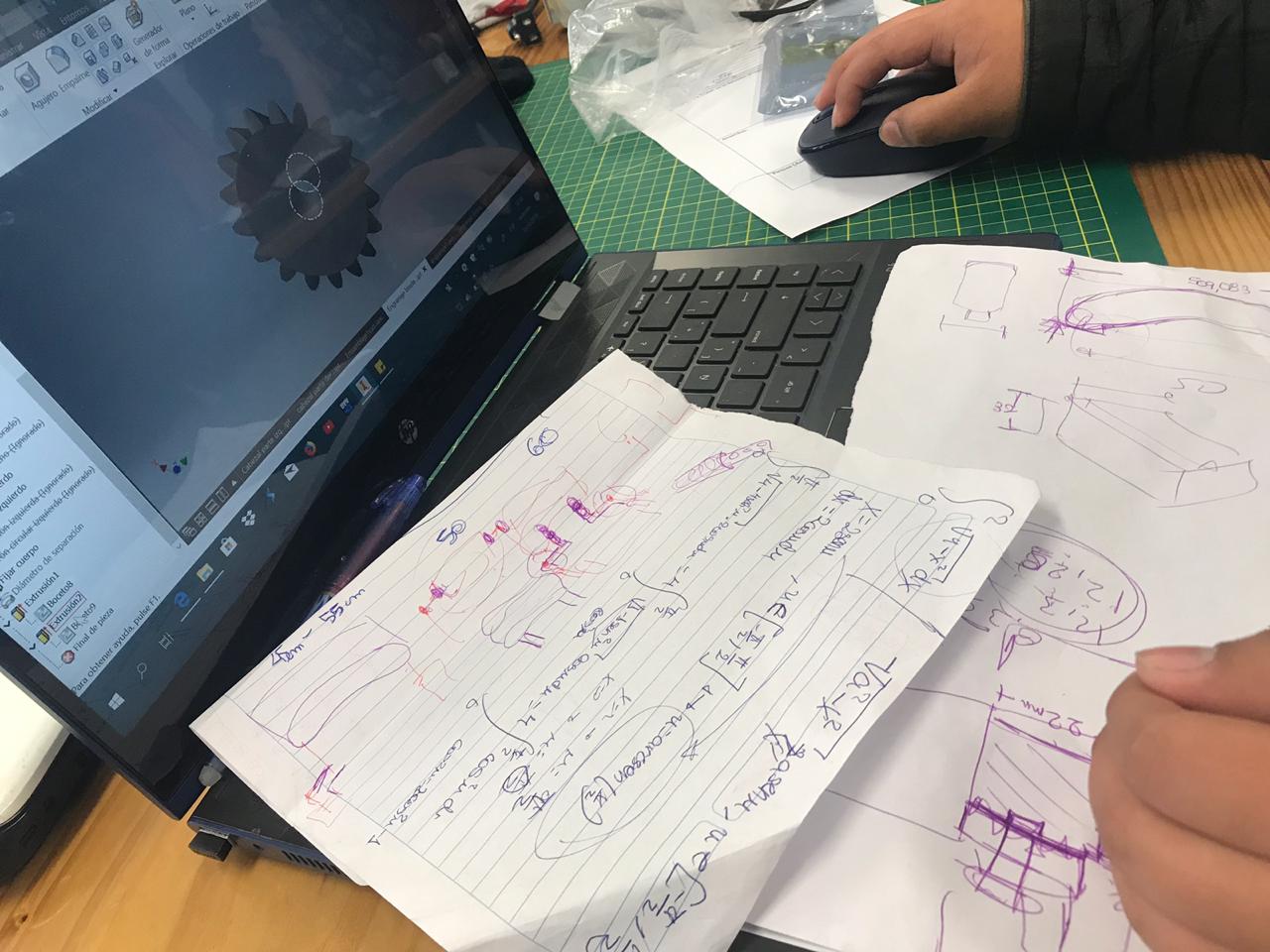
Engranes
Tuvimos que rediseñar los engranes para que tengan un doble diámetro y se adapten al eje del motor.
Bocetos
También estamos mejorando los bocetos de la propuesta final para que sean más explicativos y puedan ayudar a la documentación.
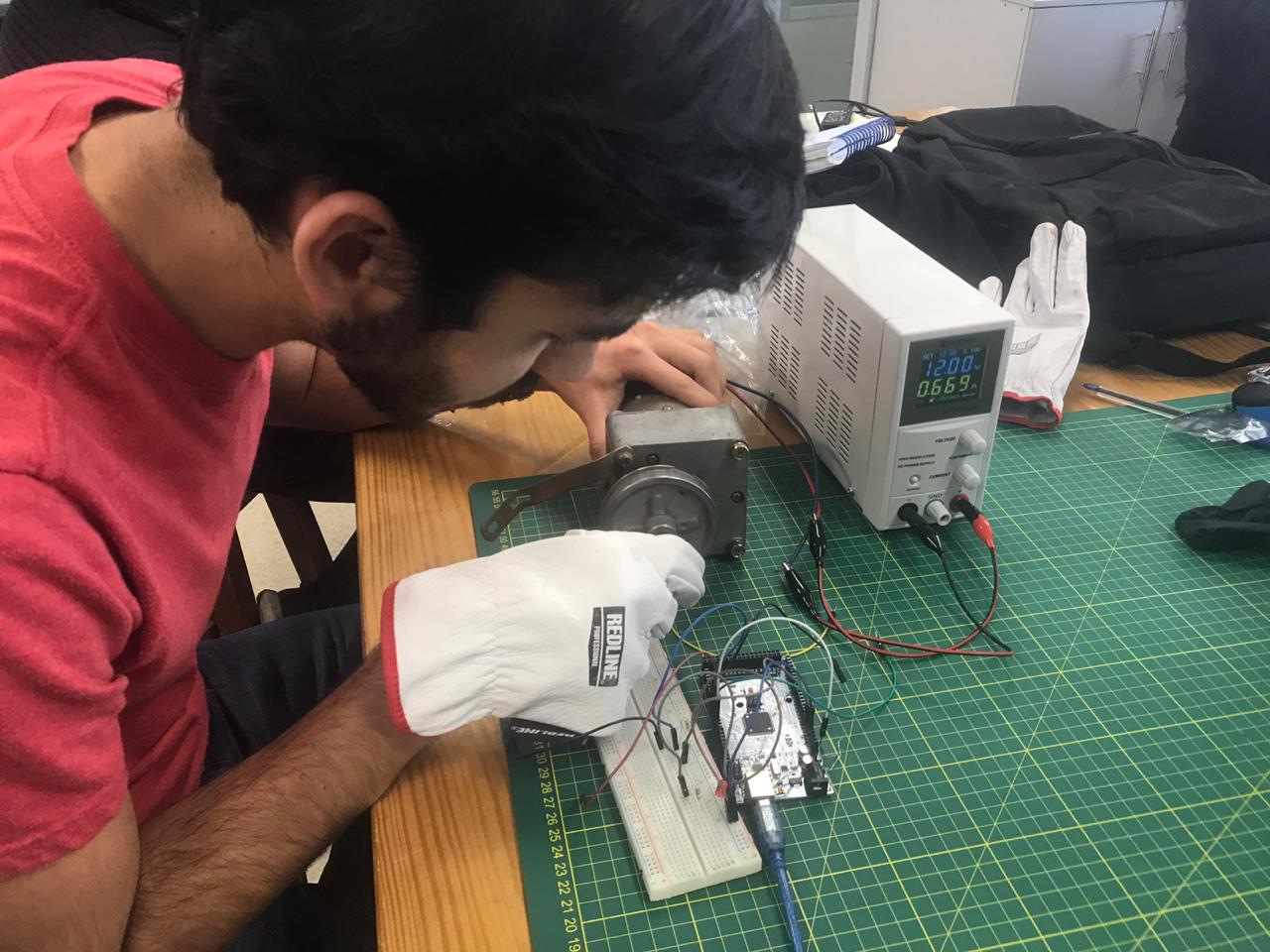
Motor
Estamos utilizando un motorreductor de 24 voltios y 5 amperios. Finalmente, tuvimos que probar el motor con una fuente externa directamente antes de probarlo con el driver.